コンプレックスを持つ人々にエレクトロニクスの楽しさを広めて行くため、出展の応募にチャレンジしてみます。
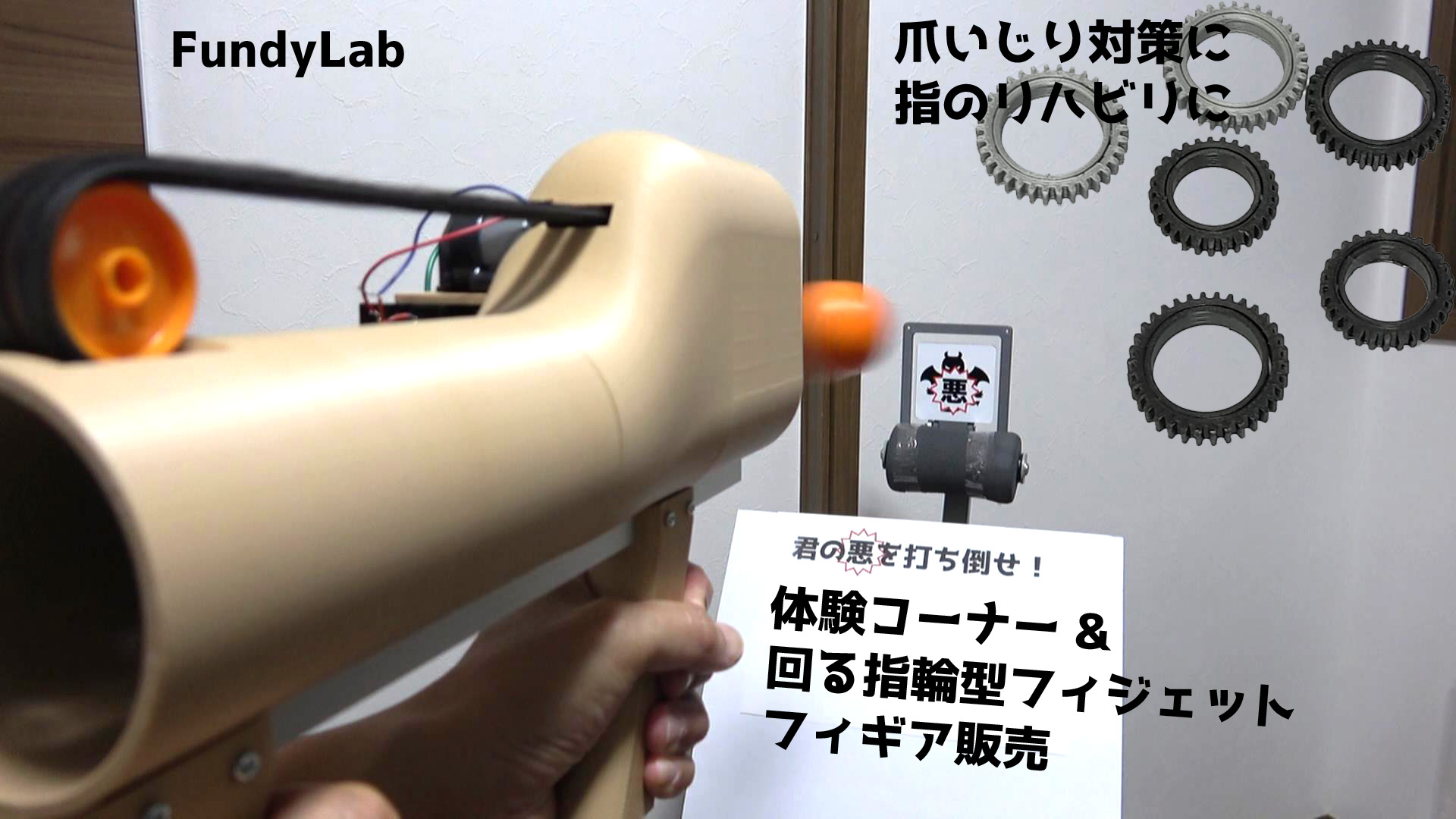
引きこもりが楽しくストレス発散するための「悪を撃ち倒す」バズーカー発射体験コーナーと、爪イジリをする自傷人のためにあなた専用サイズの回るギア型指輪フィジェット「フィギア」を3Dプリンターで出力サービスの2点を考えています。
紹介用写真はこちら(クリックで拡大)↓
紹介用動画はこちら↓

Provided Fun & Handy products
コンプレックスを持つ人々にエレクトロニクスの楽しさを広めて行くため、出展の応募にチャレンジしてみます。
引きこもりが楽しくストレス発散するための「悪を撃ち倒す」バズーカー発射体験コーナーと、爪イジリをする自傷人のためにあなた専用サイズの回るギア型指輪フィジェット「フィギア」を3Dプリンターで出力サービスの2点を考えています。
紹介用写真はこちら(クリックで拡大)↓
紹介用動画はこちら↓
各種ロボコン用に強力なモータードライバーが欲しいとの声を受け開発しました。
用途: 単方向、RS-540系ブラシ付DCモーター用PWMモータドライバ、60V200A出力です。RS-540/RS-755等のモータや、ソレノイド、ヒータなどに使用可能。
特徴: 見てわかりやすい!逆起電力モニタLED&吸収回路搭載。MOSFETが誤点呼しにくい基板パターンを実現。ヒートシンクレス設計。実用新案出願済。
詳細: ゲート駆動用昇圧回路内蔵、3.0-10V入力で動作、Arduino等の各種3.3V/5V系マイコン電源から供給可能。MOSFETを4並列内蔵、放熱器レス、増強可能。PWM信号入力最大100kHz、0-100%Duty、最小ON/OFF-duty幅0.4us。※単方向のため正転逆転切り替え機能はありません
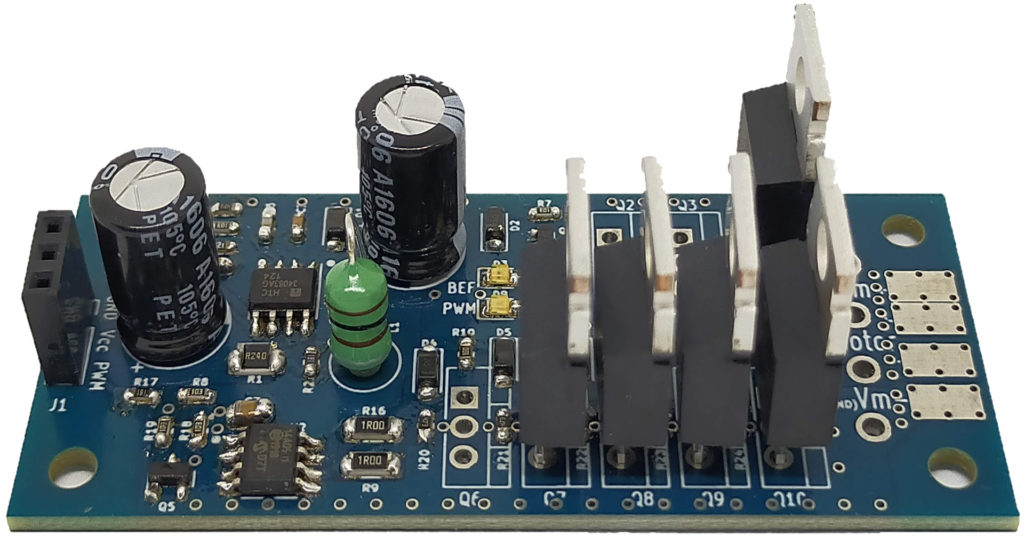
寸法: 基板寸法 W70×D30×H22mm typ.
必要工具類: はんだコテ(80W以上の即熱はんだこてを推奨)、はんだ、ニッパー、ラジオペンチ、安定化電源
必要部品: PWM信号生成用マイコンArduino等、ヒューズ、ヒューズホルダ、各種コネクタ、電線(負荷電流に合わせて1.25sqや2sq以上)
組み立て説明書、各種資料はこちら↓
↑取扱説明書です。PDFドキュメント形式です。
更新履歴
2023/4/16 v1.1 Vcc起動時電流低減のため、U1変更
4つのボタンを正しい順番(ロックパスワード)で押すと電子ロックが解除する、大切なものを入れられる電子宝箱組立キットです。各種カードゲームのデッキケースが入るサイズになっています。はんだ付けやコイルの巻線、木工工作と幅広い工作にチャレンジしてみたい中高生以上の方に。巻いたコイルの磁力でロックが解除されるため、中学生の理科や技術家庭の授業にも対応しています。Arduino内蔵で、オプションでプログラミングするとロックパスワード桁数を増やしたり、ボタン押下音、ロック解除音、パスワードミス音を変更したり、LEDの点滅パターンを変更したり出来ます。写真は本キットにデコレーションした画像です。※デコレーション部材は入っていません。※実用新案出願済み


仕様
・外寸:W115×D104×H122 mm (突起部を除く)
・内寸:W107×D72×H約100 mm
・電源:単4アルカリ乾電池×2本 (別売り)
・材質:板/MDF、樹脂パーツ/PLA
・パスワード:ボタン4つ、初期パスワード4桁、4桁迄プログラミング無しで変更可能
・必要工具類:はんだコテ、はんだ、ニッパー、ラジオペンチ、+ドライバー#1(先細め)、木工用ボンド(速乾)、テープ、その他リメイクシートやシール等
組み立て説明書、各種資料はこちら↓
↑組み立て説明書です。PDFドキュメント形式です。
↑参考回路図です。
(2021.10.28公開)↑Arduinoによるプログラミング方法です。パスワードの最大長さを変えたり、LEDの点灯速度や音の変更方法を記載しています。
面実装部品(チップLED)のはんだ付けをトライしてみたい方に。LED付きで分かりやすくなった、インタフェースキットです。ArduinoやPIC(以下MCUと記載)等の各種3.3V/5V系マイコンでは直接動かせない様な、12/24V系PLCシーケンサやステッピングモータ、サイズの大きい高Vfの7segLEDを点灯させるときにも使用できます
※LEDは熱に弱いため、はんだ付けの際はご注意下さい。小手先がLEDの樹脂部分に触れると溶ける恐れがあります

技術資料のダウンロードはこちら↓
LEDやヒーター等の定電流で駆動したい負荷向け。トリマ抵抗で設定した電流値になるよう定電流制御します。複数の定電流Diodeをこれ1つに。3.3/5Vコントロール可

データシートのダウンロードはこちら↓
ArduinoやPIC(以下MCUと記載)等の各種3.3V/5V系マイコンでは直接動かせない様な、12/24V系PLCシーケンサやステッピングモータ、サイズの大きい高Vfの7segLEDを点灯させるときに使用できる、色々使えるインタフェースキットです


技術資料はこちら↓